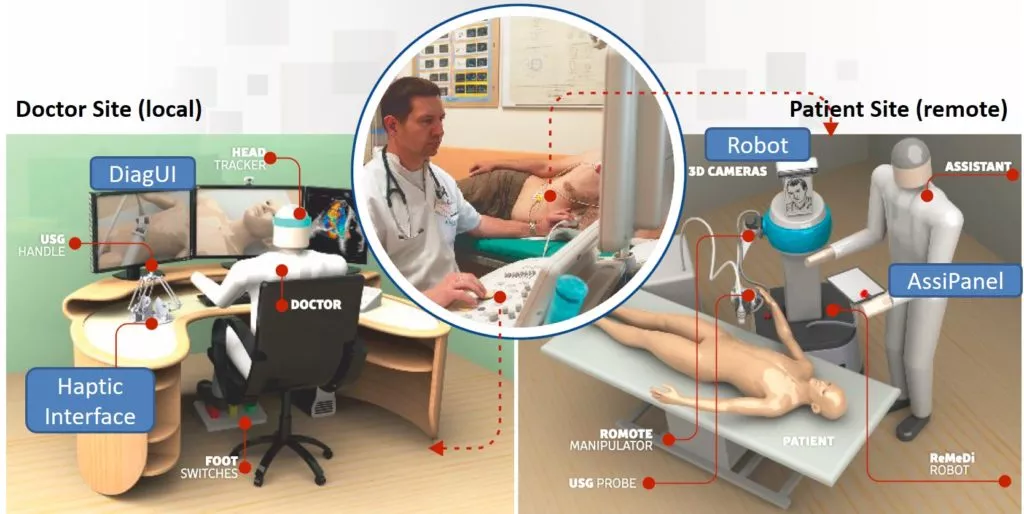
Use case scenarios targeted in ReMeDi feature a robot capable of performing a physical examination, specifically of the two most widespread examination techniques i) palpation, i.e. pressing the patient’s stomach with the doctor’s hand and observing the stiffness of the internal organs and the patient’s feedback (discomfort, pain) as well as ii) ultrasonographic examination. Besides quality teleconferencing, ReMeDi features a mobile robot (placed in a hospital) equipped with a lightweight and inherently safe manipulator with an advanced sensorized head and/or ultrasonic probe; and the remote interface (placed at the doctor’s location) equipped with sophisticated force-feedback, active vision, and locomotion capabilities.
The system is incrementally built following a user-centered design approach, and its usability concerning the patient and the examining doctor is extensively studied in real-world scenarios of cardiac examination. ReMeDi will go beyond classical telepresence concepts: It will capture and process multi-sensory data (integrating visual, haptic, speech, patient’s emotions, and physiological responses) into perception and reasoning capabilities making ReMeDi a diagnostic assistant offering context-dependent and proactive support for the doctor. Particular attention is devoted to safety aspects. The normative standards (both existing and in draft) and the results of ongoing research projects will be integrated into all the system development phases.